I'm a 4th year Ph.D. student at Stanford's Autonomous Systems Lab, advised by Prof. Marco Pavone. I build dynamics-grounded world models for embodied intelligence. My work asks how robots can distill high-dimensional dynamics into compact internal models that are:
- Predictive enough to foresee the future
- Structured enough to control
- Faithful enough to remain useful when first-principles break
Applications span soft robotics, continuum manipulation, model-based reinforcement learning, and autonomous spacecraft. My goal is to build embodied systems that understand the world well enough to act with precision, adaptability, and foresight.
Education
-
Stanford University 2022 – 2024
M.S., Aeronautics & Astronautics
-
California Institute of Technology 2018 – 2022
B.S., Mechanical Engineering & Aerospace Engineering (Minor)
Publications
Full list ↗-
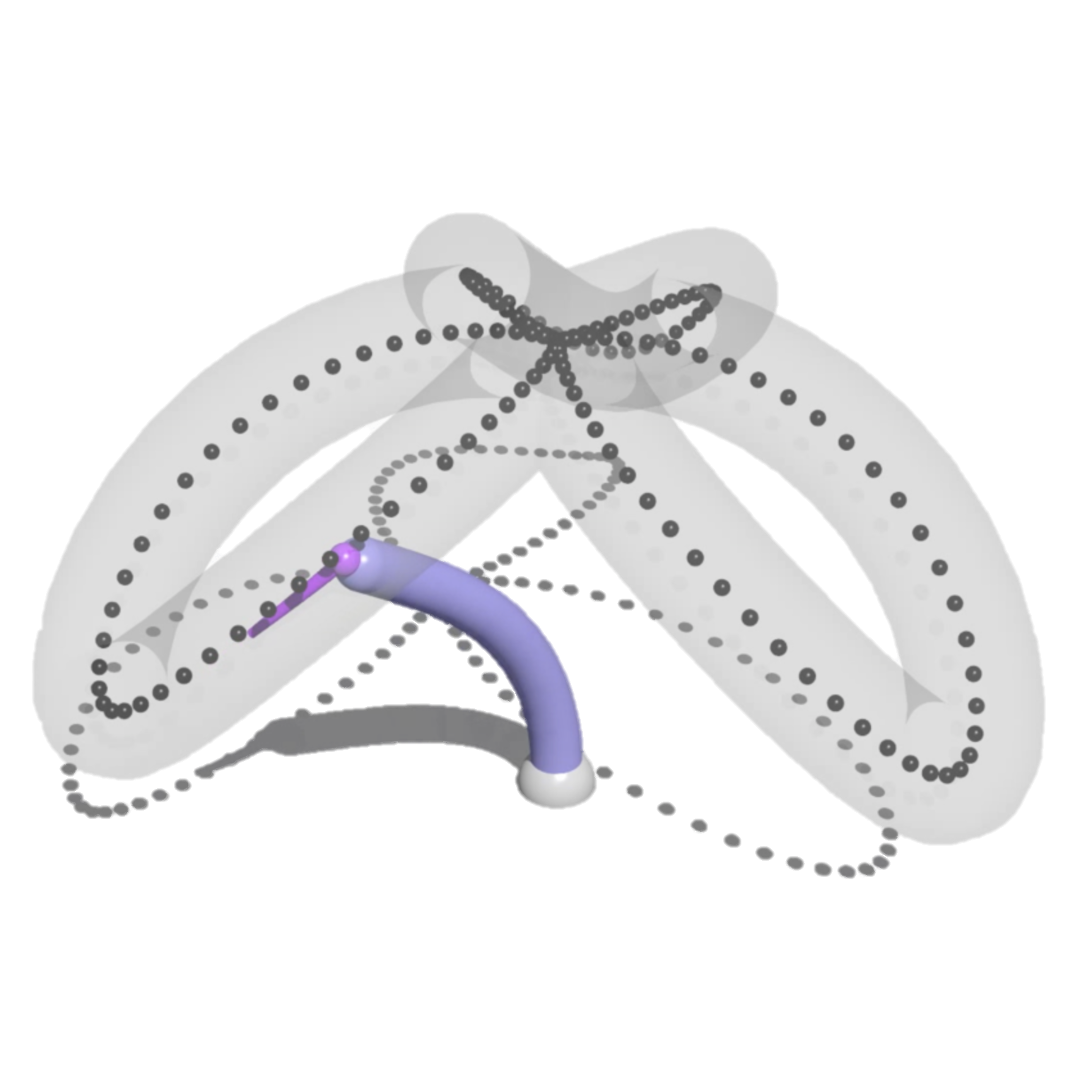
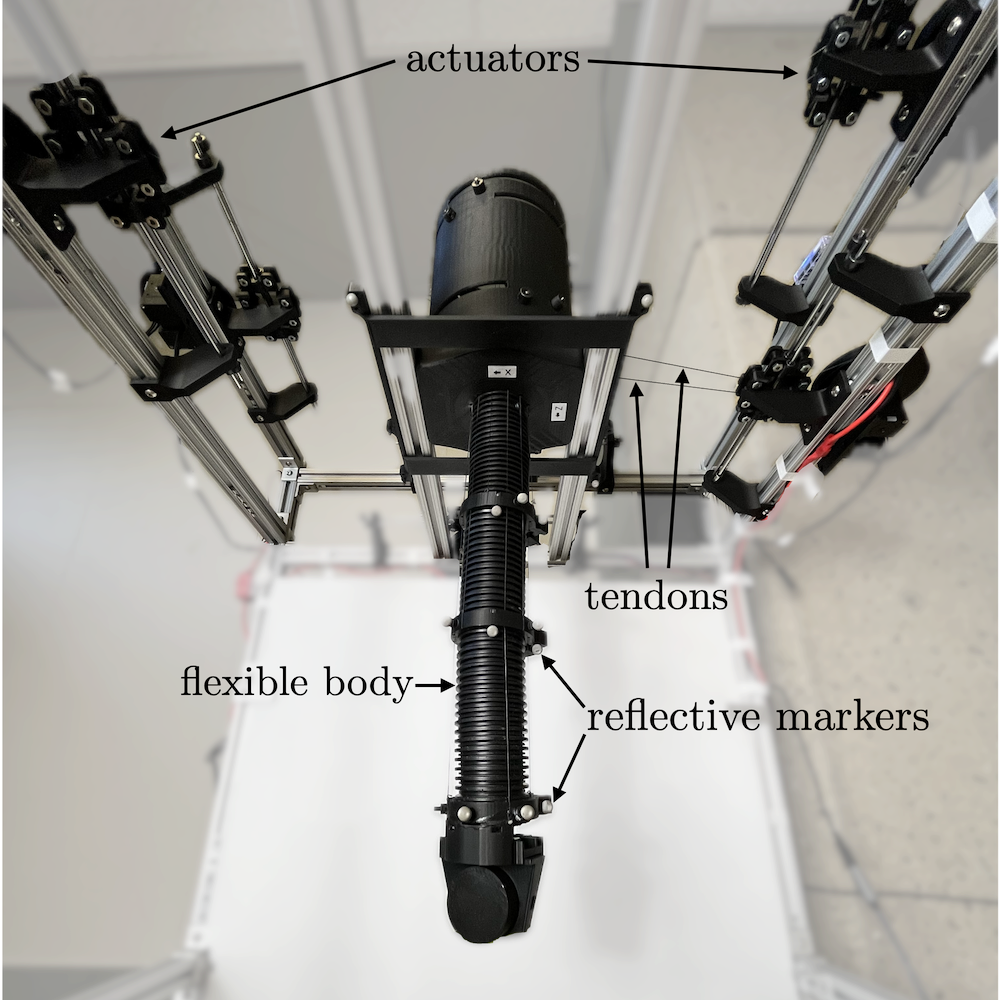
Data-Driven Soft Robot Control via Adiabatic Spectral Submanifolds
Compact, data-driven models adapt to a soft robot's ever-changing dynamics, enabling precise control even as the system drifts far from where it was trained.
-
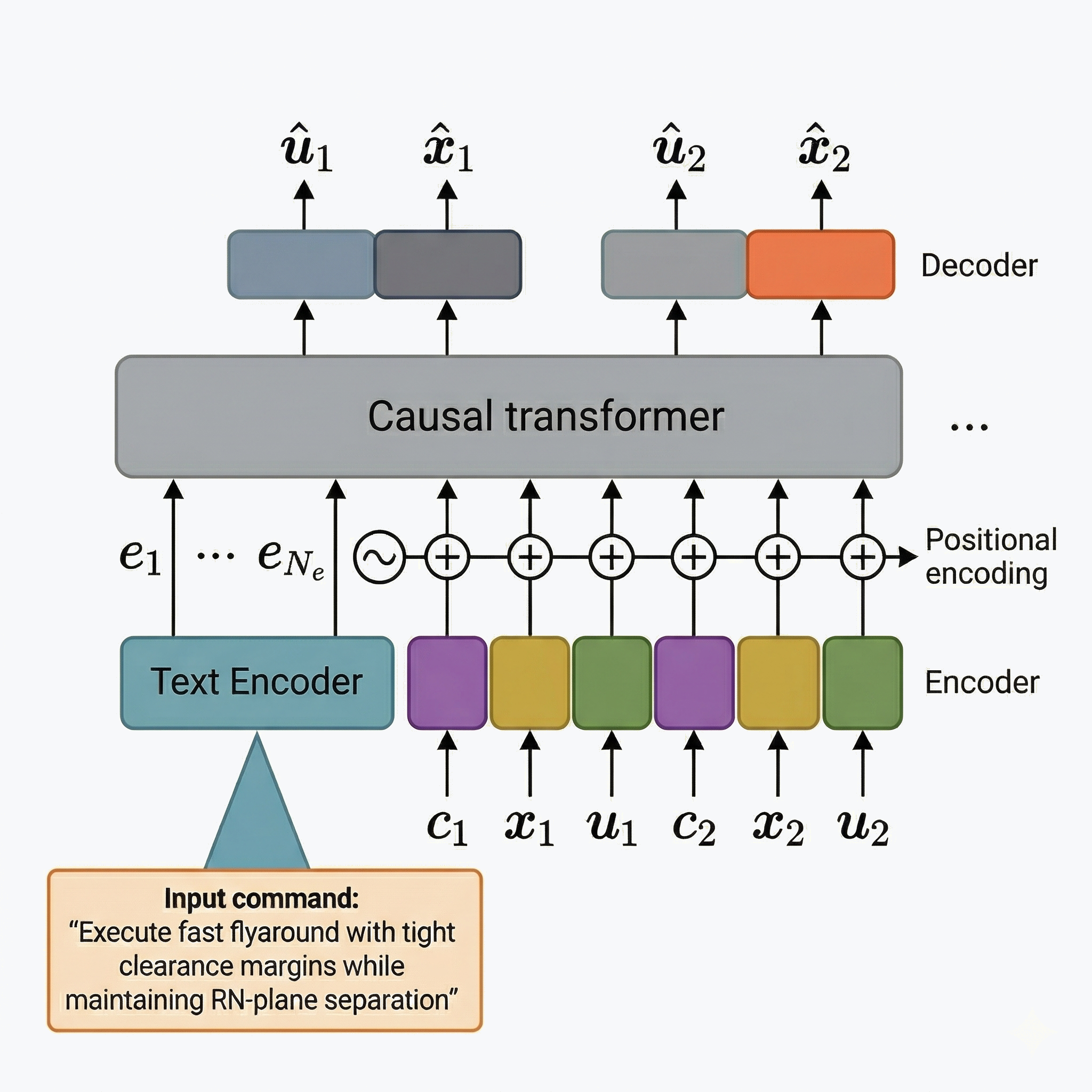
Language-Conditioned Safe Trajectory Generation for Spacecraft Rendezvous
Large language models translate high-level mission objectives into feasible spacecraft rendezvous trajectories.
-
Graph Neural Model Predictive Control for High-Dimensional Systems
Graph neural networks learn to approximate MPC solutions, enabling real-time control of high-dimensional systems.
-
Learning Actuator-Aware Spectral Submanifolds for Precise Control of Continuum Robots
Incorporating actuator dynamics into spectral submanifold models enables precise feedforward control of continuum robots.
-
Semantic Trajectory Generation for Goal-Oriented Spacecraft Rendezvous
Language models ground high-level mission goals into dynamically feasible rendezvous trajectories for spacecraft.
Prompt: "A left-bias routing is pursued while skirting the central KOZ." -
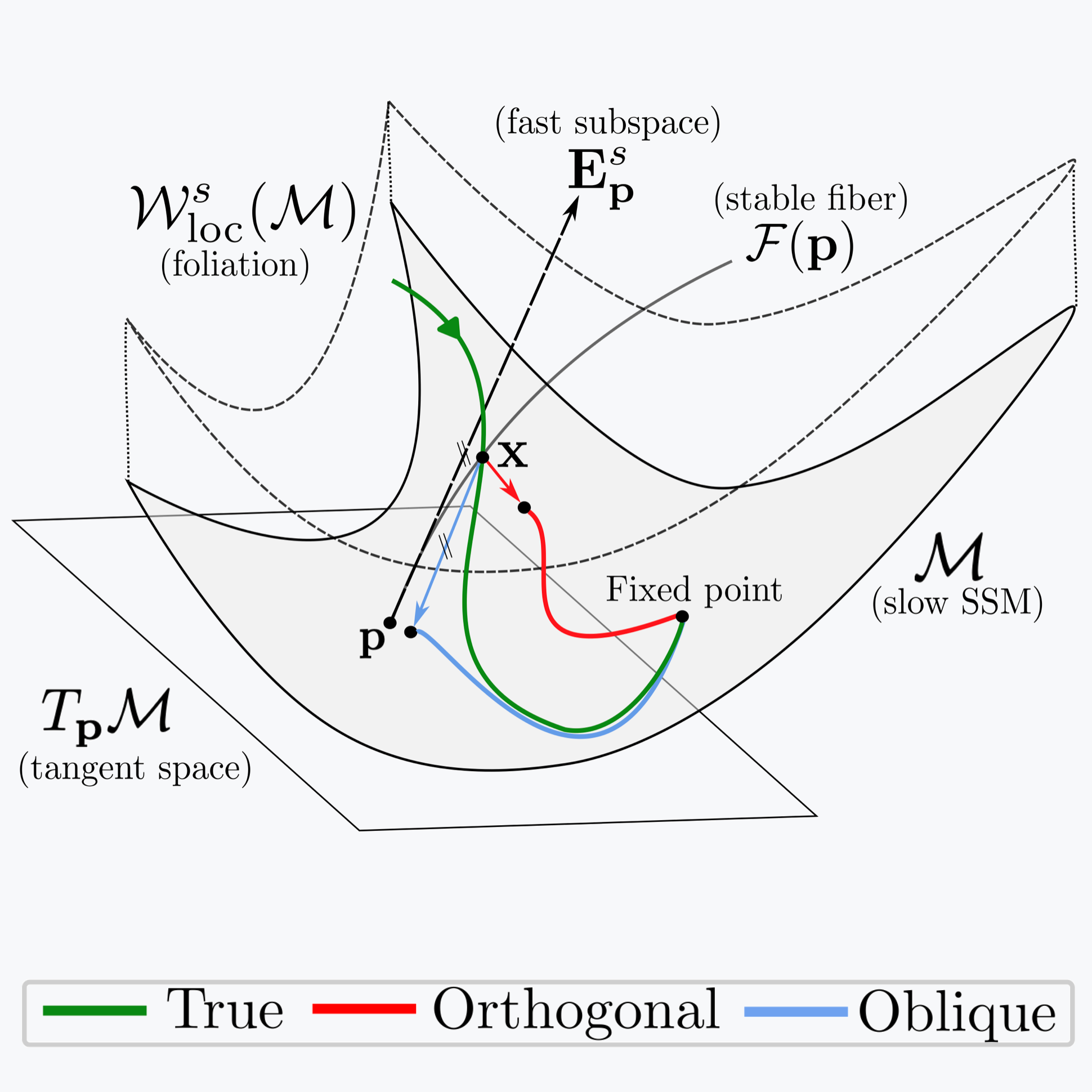
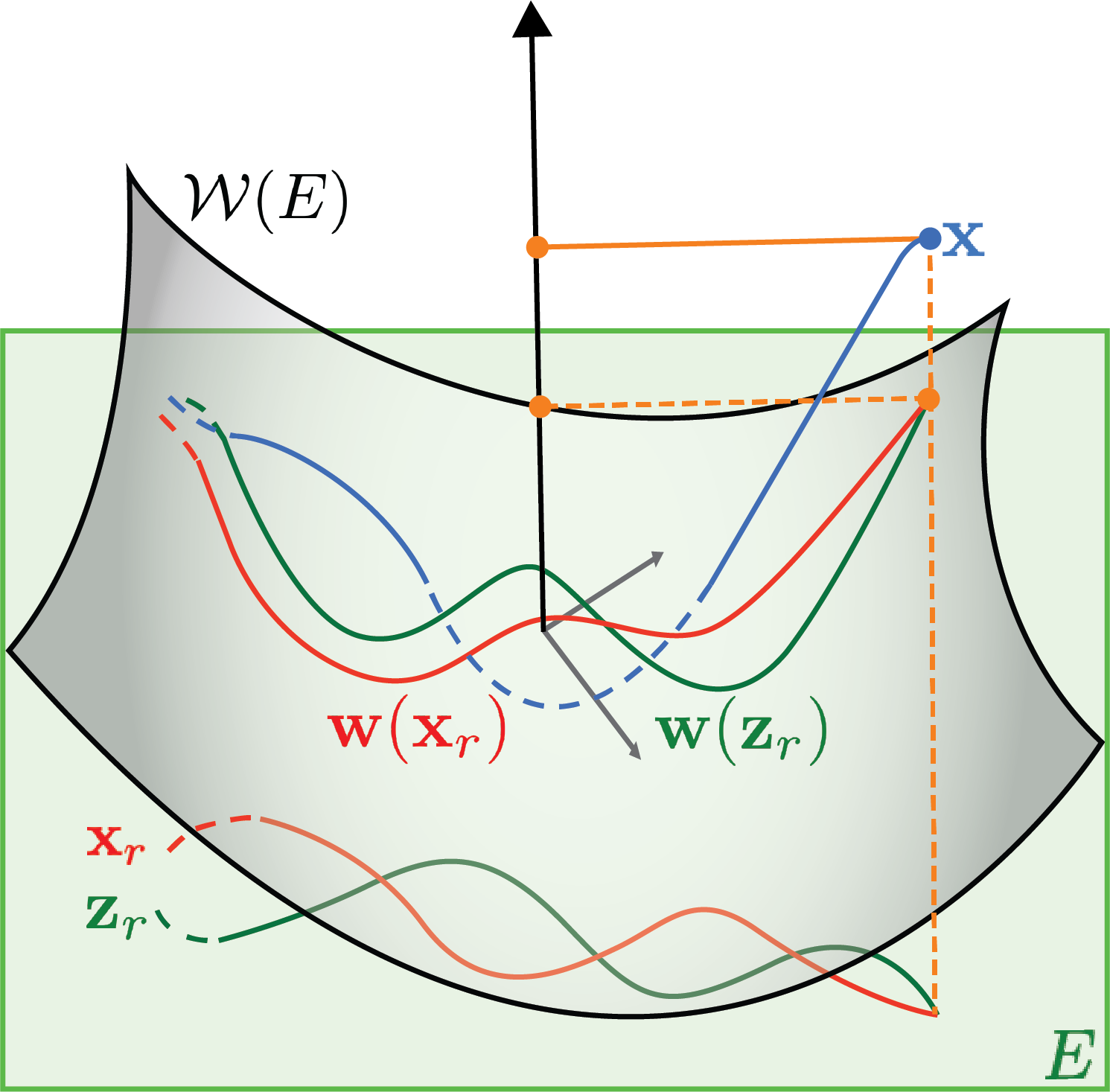
Taming High-Dimensional Dynamics: Learning Optimal Projections onto Spectral Submanifolds
Learning optimal projection coordinates onto spectral submanifolds yields faithful low-dimensional models of high-dimensional dynamics.
-
Perfecting Periodic Trajectory Tracking: Model Predictive Control with a Periodic Observer (Π-MPC)
Even when the system model is imperfect, a simple periodic observer can recover perfect tracking for periodic trajectories.
-
Robust Nonlinear Reduced-Order Model Predictive Control
We quantify the uncertainty introduced by model reduction and use it inside predictive control to keep operation stable and safe.
-
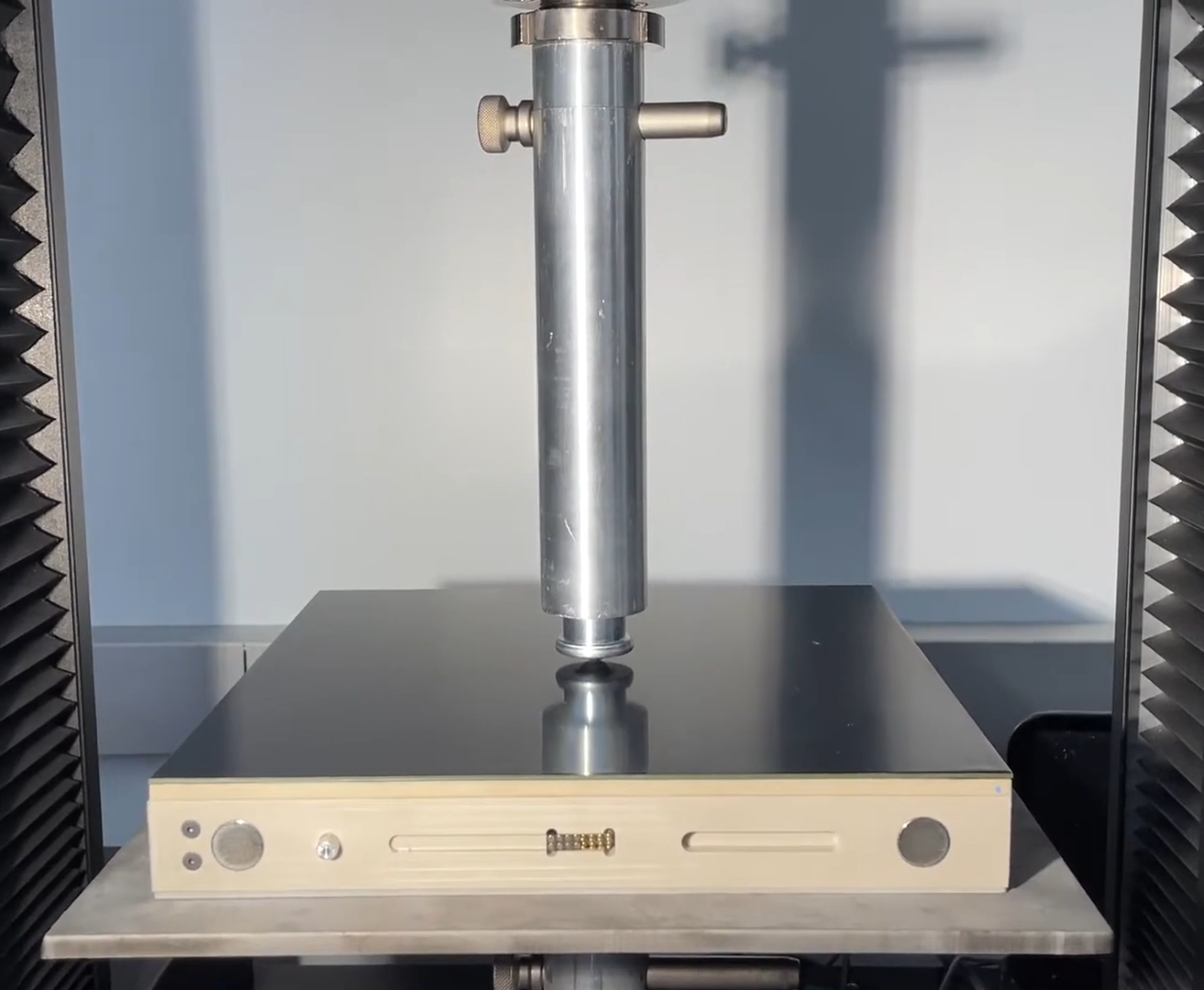
Design of a Modular and Orientable Electrodynamic Shield for Lunar Dust Mitigation
Modular panels tile together and generate a traveling electric field that automatically cleans dust from surfaces.
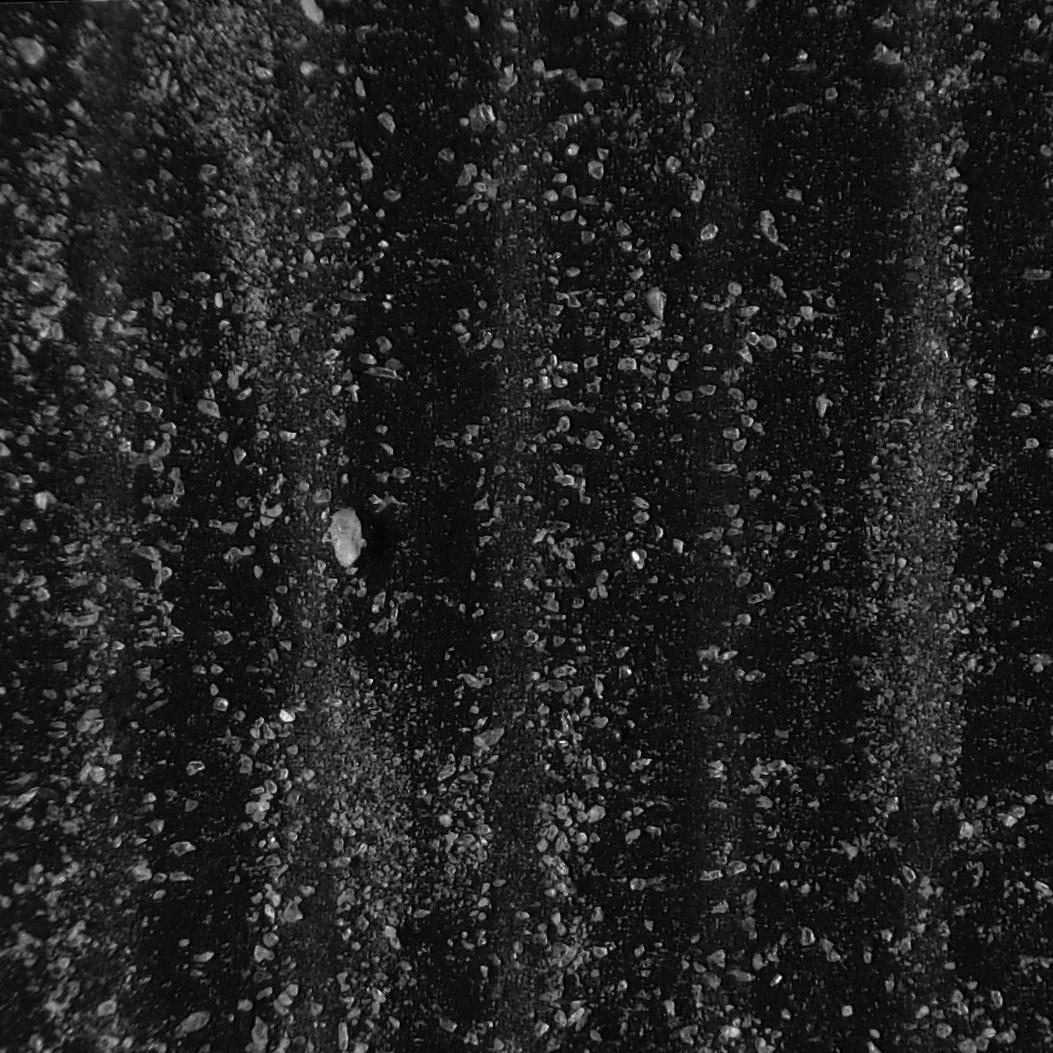 Before
Before
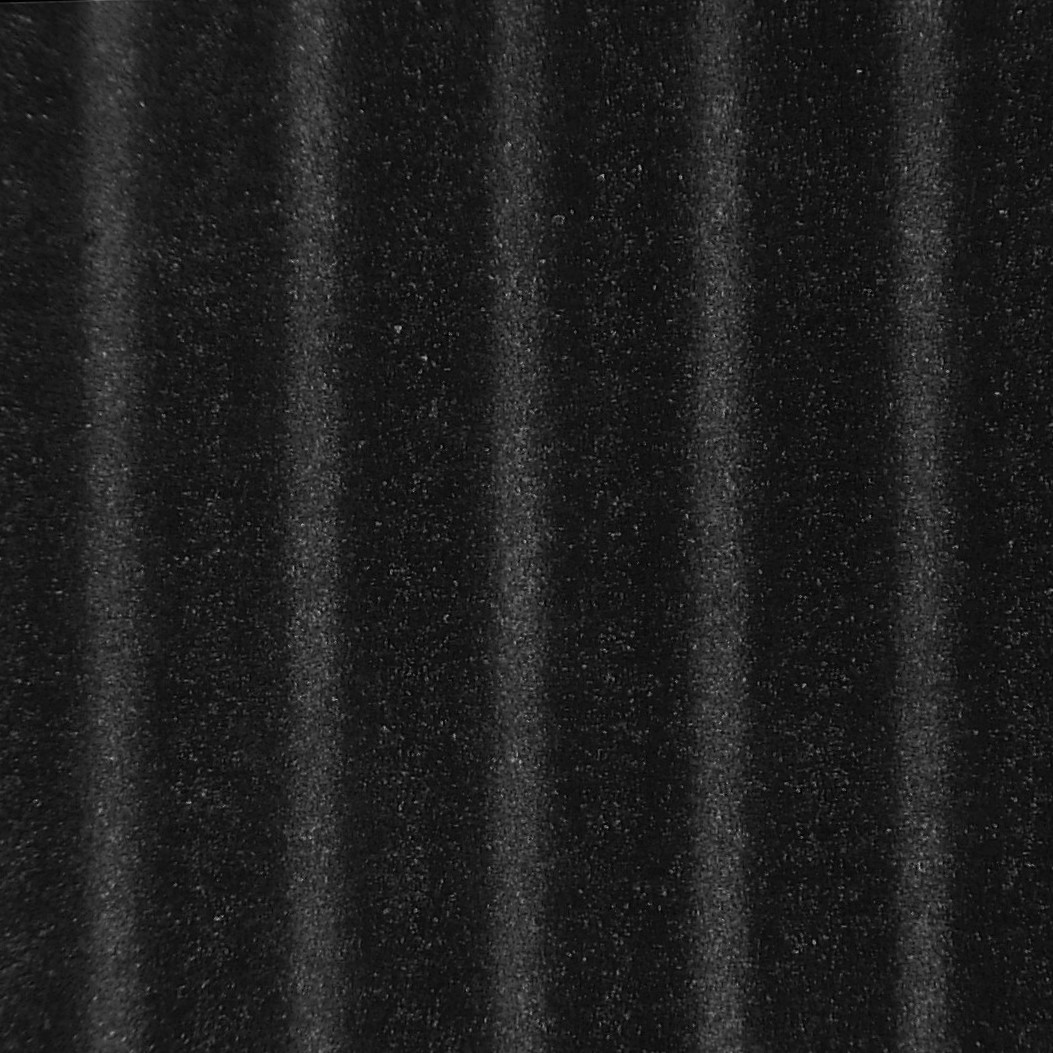 After
After
★ denotes equal contribution.
Project Highlights

Experience
-
Autonomous Systems Lab, Stanford Stanford, CA
CurrentGraduate Research Assistant · Advisor: Prof. Marco Pavone
World models for real-time predictive control
-
USAF Test Pilot School Edwards AFB
2026Test Management Project Lead (embedded from Stanford)
First reasoning-model-based ISR flight test; evaluation methodologies for foundation models in airborne operations
-
Stealth Startup Generative AI / Entertainment
Jun – Sep 2025Co-Founder & Technical Lead
Generative AI platform for filmmaking and visual storytelling
-

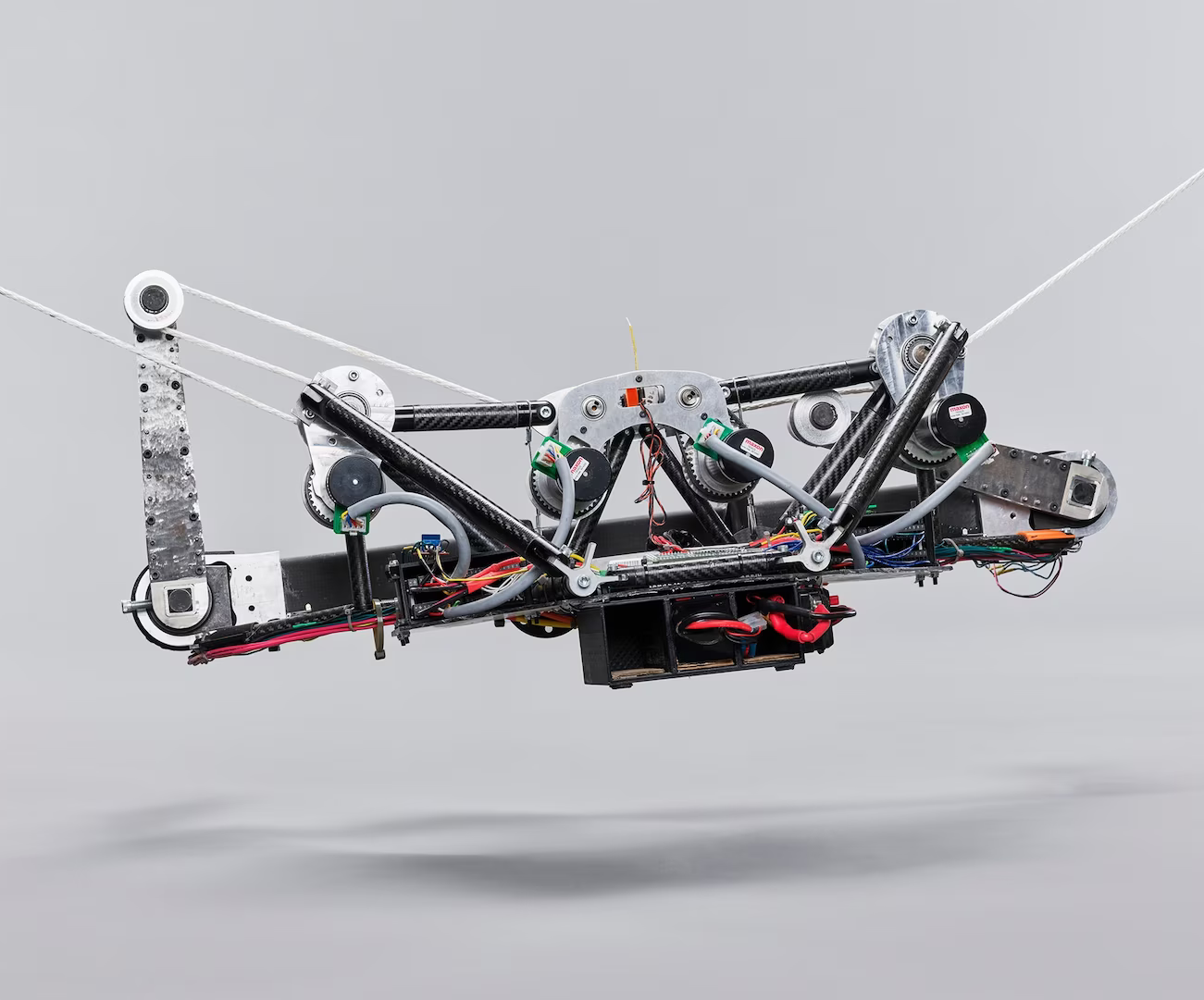
NASA Jet Propulsion Laboratory Pasadena, CA
Jun – Sep 2022Robotics System Engineering Intern · Mentors: Dr. Issa Nesnas & Dr. Travis Brown
Tether tension control and management system design for the Axel cliff rover
-

Aerospace Robotics and Control Lab, Caltech
2021 – 2022Research Fellow · Mentors: Prof. Soon-Jo Chung & Prof. Guanya Shi
Stochastic delay compensation for aggressive multirotor trajectory tracking
-

Honeywell Aerospace, Advanced Technology Group Tempe, AZ
Jun – Sep 2020Research and Development Intern
Learning-based real-time anomaly detection for metal additive manufacturing
-

TEAM CoSTAR JPL, MIT, Caltech, KAIST
2019 – 2020Research Fellow, DARPA Subterranean Challenge · Mentor: Prof. Joel W. Burdick
Autonomous hybrid flying/driving platform design and motion planning
Selected Awards
- Best Paper Finalist AIAA Intelligent Systems, SciTechAIAA SciTech 2026
- ENOC Young Investigator Prize European Nonlinear Dynamics Conference 2024
- Stanford Graduate Fellowship ~100 awarded annually 2022
- Best Paper Award AIAA International Student Conference, SciTechAIAA SciTech 2022
- Mechanical Engineering Award Caltech, for outstanding originality and creativityCaltech 2022
- Henry Ford II Scholar Award Caltech, top academic record in MECaltech 2021