I'm currently a Ph.D. student at Stanford's Autonomous Systems Lab, advised by Prof. Marco Pavone. My research focuses on creating algorithms for safe and efficient learning + control of complex systems.
Prior to Stanford, I earned a B.S. in Mechanical Engineering with a minor in Aerospace from the California Institute of Technology. At Caltech, among other projects, I delved into learning of residual dynamics with Prof. Soon-Jo Chung at the Autonomous Robotics and Control Lab, and worked on aerial manipulation under Prof. Joel Burdick. I founded Caltech Air and Outer Space (CAOS) and held leadership roles in teams that secured over $360,000 in the 2021 and 2022 NASA BIG Idea Challenge. I have also interned at both Honeywell Aerospace and the NASA Jet Propulsion Laboratory.

Publications
How can robots efficiently learn from their own experiences, safely interact with the world around them, and adapt to unfamiliar environments?
International Conference on Intelligent Robots and Systems (IROS), 2024
[arXiv]
Even when our model of a system is imperfect, we can use a simple periodic observer to achieve perfect tracking for periodic trajectories.
Conference on Decision and Control (CDC), 2023
[arXiv]
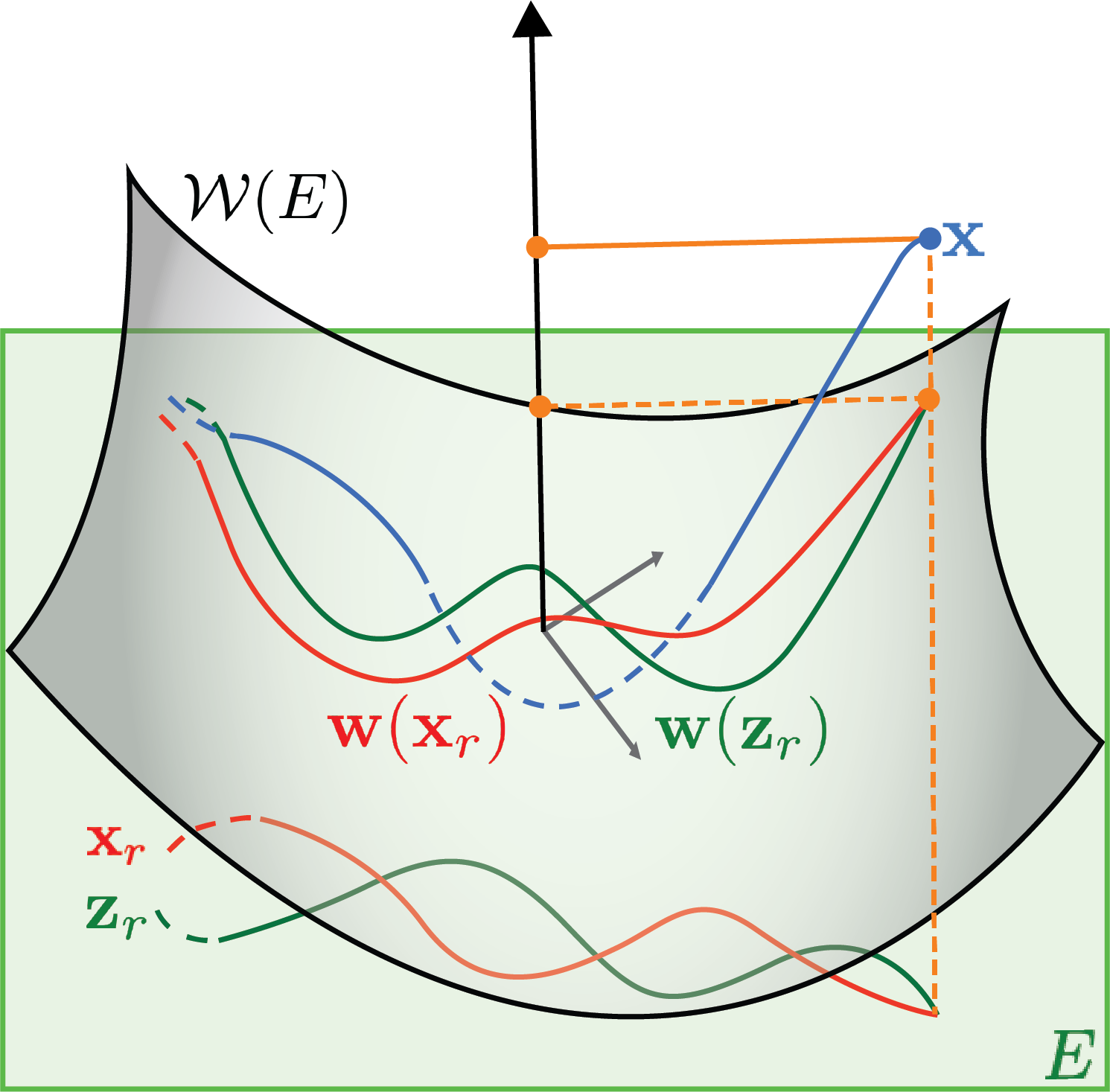
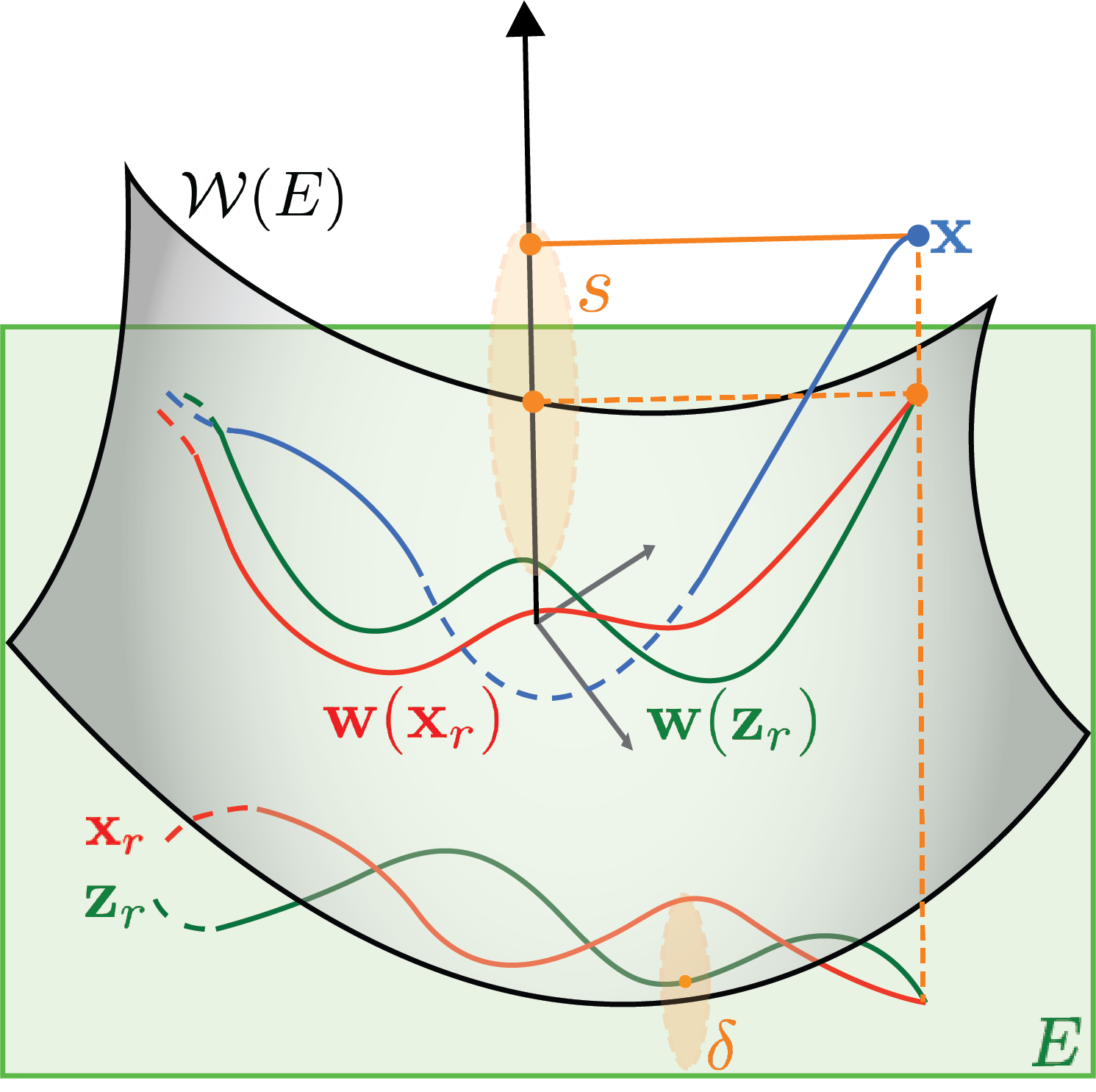
We quantify the uncertainty introduced after reducing the dimensionality of a system model and leverage it in a predictive control approach, ensuring stable and safe operation by dynamically adjusting how cautious the controller is.
What will the future of Lunar and Martian exploration look like?
Science and Technology Forum and Exposition (SciTech), 2022 (Best Team Paper Award)
[arXiv] [AIAA news] [Caltech news]
Panels that tile together and generate a traveling electric field to automatically clean dust from any surface - the first modular implementation of electrodynamic dust shielding (EDS).
Project Highlights
-
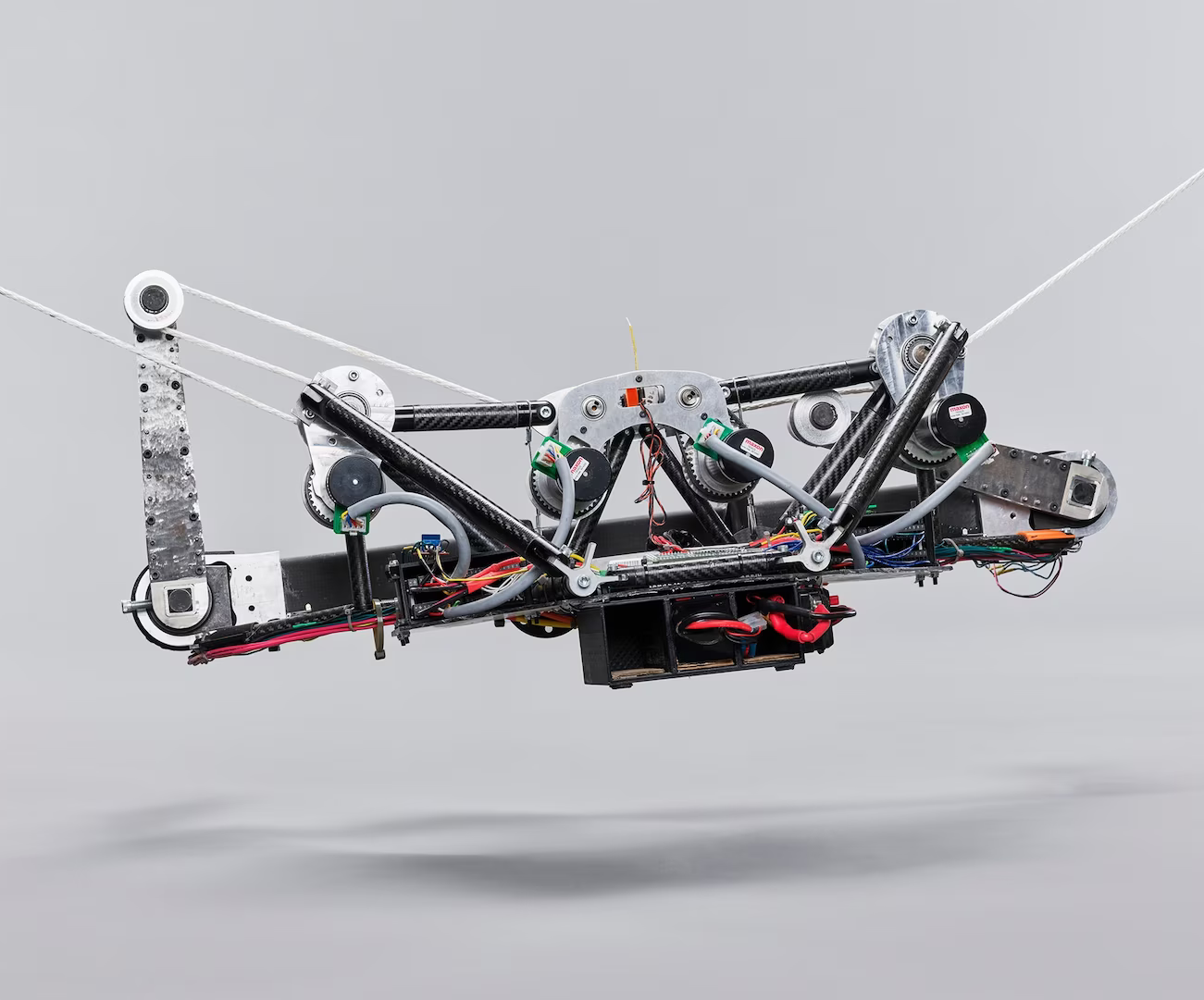
LATTICE Shuttle
Featured in National Geographic, NASA, and Caltech [1], [2] news
Watch the full LATTICE System demonstration -

Axel Rover
Tether Management SystemInternship @ NASA JPL Robotic Mobility Group under Dr. Travis Brown and Dr. Issa Nesnas
-
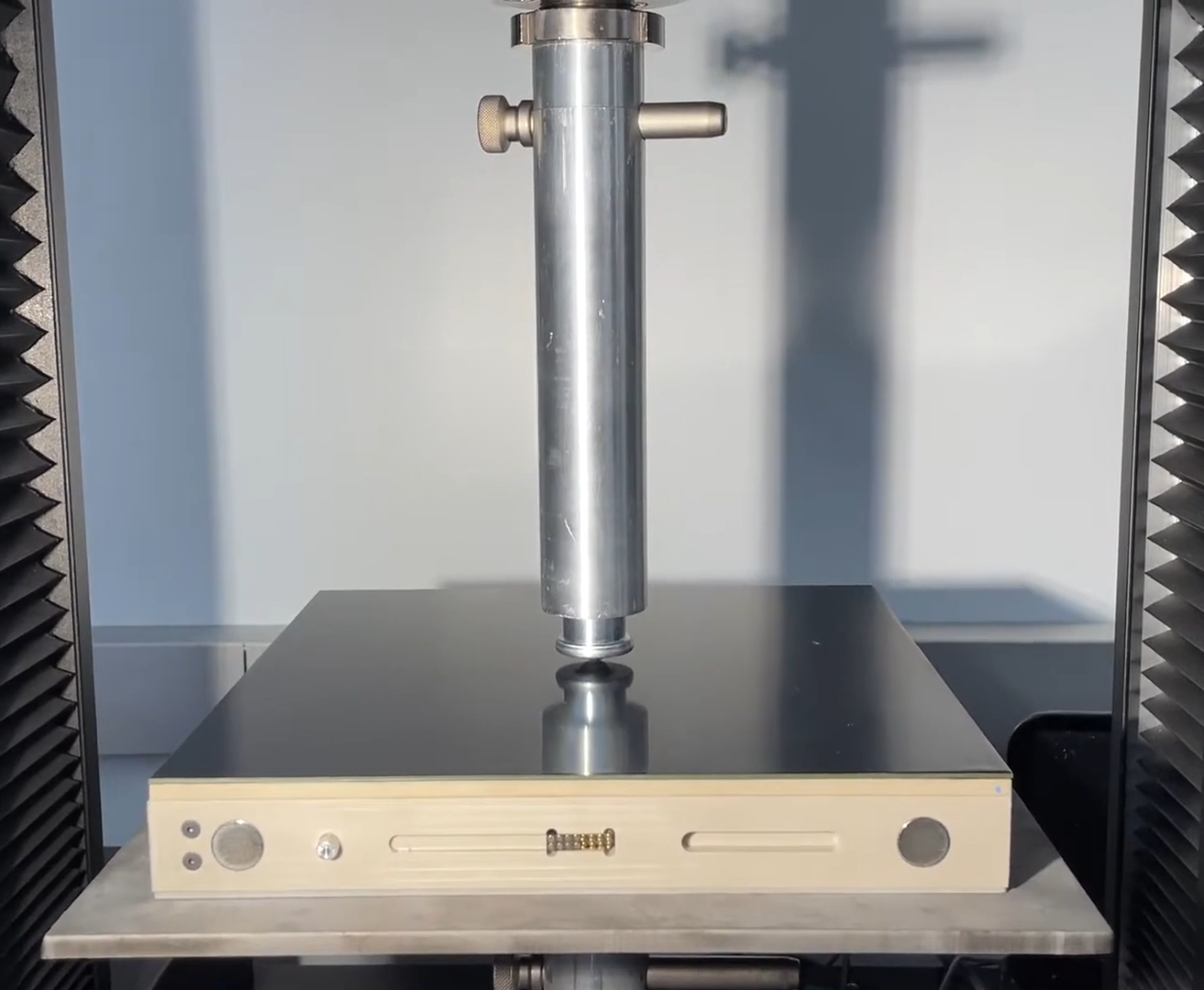
HOMES (Habitat Orientable & Modular Electrodynamic Shield)
Founder and Manufacturing lead, advised by Prof. Soon-Jo Chung (full credits in tech. paper)
Featured in NASA and Caltech news
Selected Honors
- Mechanical Engineering Award, Caltech, 2022 ($1,000 Cash Award)
Recognized for academic performance demonstrating outstanding original thinking and creativity, as judged by a faculty committee - Most Visionary Concept, NASA BIG Idea Forum 2022
- NASA BIG Idea Challenge 2022 Award ($180,000 Grant)
Founded one of the seven university teams selected to develop robotic systems with unconventional locomotion modalities for extreme lunar terrains
- Henry Ford II Scholar Award, Caltech, 2021 ($5,000 Cash Award)
Awarded for highest academic record within Mechanical Engineering - Best Product Development, NASA BIG Idea Forum 2021
- NASA BIG Idea Challenge 2021 Award ($180,000 Grant)
Founded one of seven university teams selected to develop lunar dust mitigation technologies
Teaching & Service
-
Workshops
Structural Priors as Inductive Biases for Learning Robot Dynamics at Robotics: Science and Systems (RSS) - Course Assistant, Stanford
- Teaching Assistant, Caltech